Have you ever watched a robot try to perform a task in the real world—perhaps a robotic arm trying to grab a specific object out of a cluttered bin, or a humanoid robot trying to navigate a messy room? If you have, you might have noticed a slight hesitation. The robot pauses, computes, moves a little, pauses again, and then commits to the action. That pause isn’t uncertainty; it’s intense calculation. The robot is desperately trying to figure out how to get from Point A to Point B without smashing its elbow into a table or colliding with a human.
This process is called “motion planning,” and for decades, it has been a major bottleneck in robotics. Robots can move fast, but they think slow.
But thanks to brilliant relatively new research (appeared on late 2023, published in 2024 IEEE International Conference on Robotics and Automation (ICRA)), that robotic “thinking pause” might soon be a thing of the past. A recent paper titled “Motions in Microseconds via Vectorized Sampling-Based Planning,” authored by Wil Thomason, Zachary Kingston, and Lydia E. Kavraki, has introduced a technique that drastically speeds up how robots plan their movements. How drastic? They’ve taken planning times from milliseconds (thousandths of a second) down to microseconds (millionths of a second).
Here is a simple breakdown of how they did it, and why it’s a game-changer for the future of machines.
The Problem: Connecting the Dots in the Dark
To understand the breakthrough, we first need to understand the problem.
When a robot needs to move, it doesn’t just “see” the path like we do. It has to mathematically test thousands of possibilities. Imagine you are in a pitch-black, crowded room, and you need to get to the exit. You can’t see the obstacles. The only way to find a safe path is to reach out your hands and check random spots in front of you. “Is this spot clear? Yes. Okay, is that spot clear? No, that’s a chair.”
Traditional robot motion planning (specifically a popular type called “sampling-based planning”) works a bit like this. The robot’s computer randomly picks points in space and checks: “If I move my arm here, will I hit anything?” It has to ask this question thousands of times to build a “connect-the-dots” map of safe passage.
Checking every single dot takes time. If the environment is complex, the calculations pile up, and the robot has to pause to think.
The Solution: The Supermarket Analogy
Computers get faster by doing things in parallel—doing multiple jobs at once. Until now, robotics has mostly relied on “coarse-grained” parallelism. Think of a supermarket. If the line is long, the manager opens more checkout lanes. Now you have four cashiers working simultaneously. That’s faster, but each cashier is still scanning items one by one, beep… beep… beep.
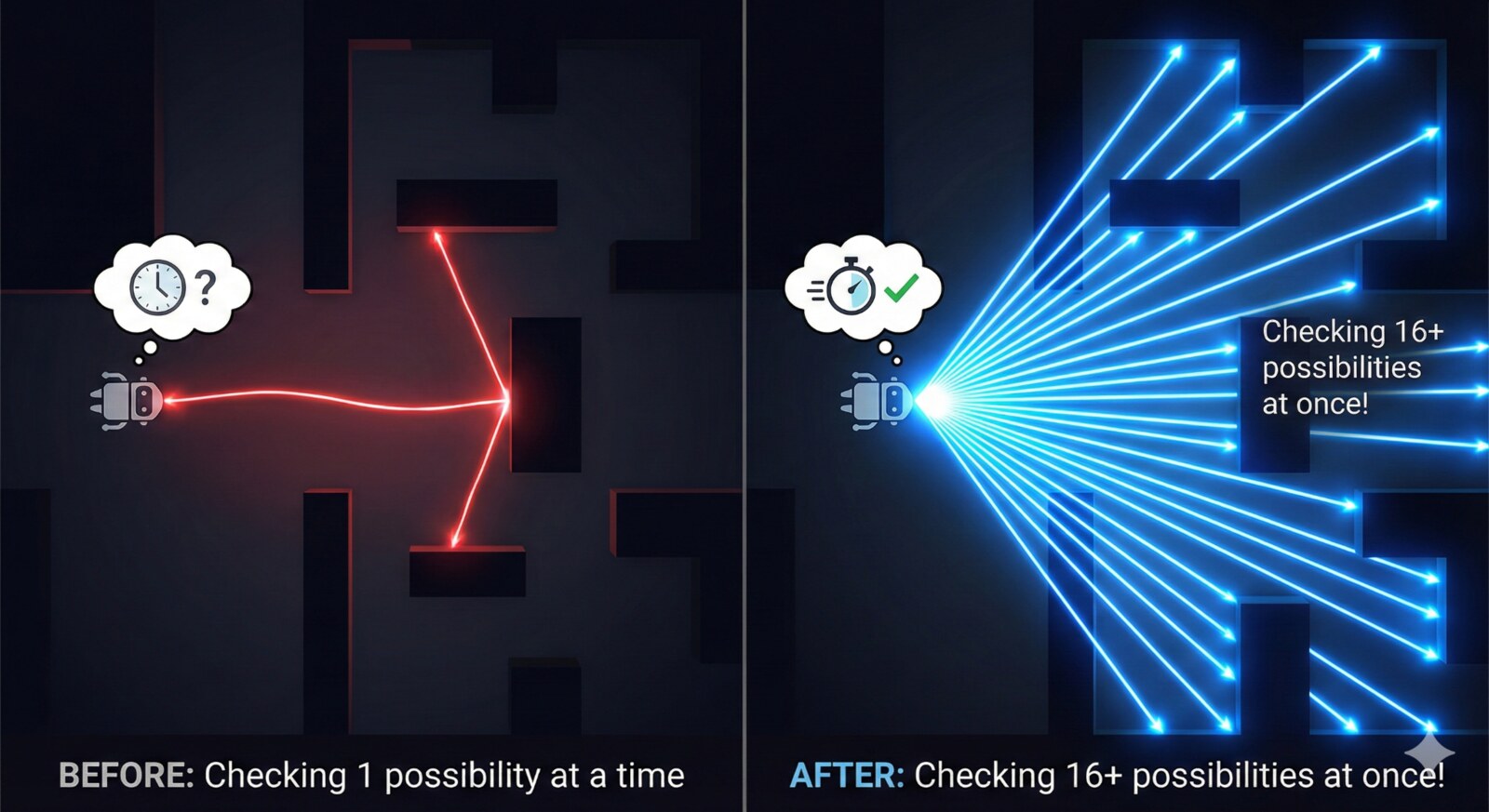
The breakthrough by Plancher, Wilcox, and Manchester utilizes something different: fine-grained parallelism, specifically through a technique called vectorization. Imagine we go back to that single cashier. But instead of a regular scanner, we give them a futuristic “super-scanner.” When they wave it over a cart, it doesn’t beep once; it instantly scans 16 items simultaneously in a single BEEP.
The researchers found a way to apply this “super-scanner” approach to the robot’s safety checks. Modern CPUs have special features (called SIMD instructions) designed to do this kind of math, but they are notoriously difficult to apply to the irregular, messy problems of robot motion planning. The brilliance of this paper lies in reorganizing the math so the robot’s computer isn’t asking, “Is this one point safe?” It’s asking, “Are these 16 points safe?” and getting the answer for all of them at the exact same instant.
The Implications: Robots That React in Real-Time
By effectively letting the robot check 16 (or more) times as many possibilities in the same amount of time, the speed limits on robotic thinking have been blown off.
Why does shifting from milliseconds to microseconds matter?
1. Truly Dynamic Robots
Today, if you throw a ball at a standard research robot, it will likely freeze. By the time it plans a path to catch the ball, the ball has already sailed past. The world changed faster than the robot could think.
With microsecond planning, a robot can re-plan its entire movement path hundreds of times during the action. If the environment changes—a person steps in the way, or the target moves—the robot can instantly adapt its path smoothly without stopping.
2. Smarter Control Systems
In advanced robotics, there is a technique called Model Predictive Control (MPC). It’s basically the robot constantly asking, “Given what just happened, what is the best thing to do for the next few seconds?” To work well, MPC needs to run very, very fast.
Previously, motion planning was too slow to be used directly inside this tight control loop. This new vectorized approach is so fast that high-level planning can now happen at the same speed as low-level motor control. This merges “planning” and “doing” into a single, seamless process.
3. More Complex Machines
Generally, the more joints a robot has, the harder it is to plan its motion. A snake robot is harder to control than a simple robotic arm.
This new speed boost means we can control highly complex robots just as quickly as simpler ones, opening the door for more capable designs in unstructured environments like disaster zones or homes.
A New “Speed of Thought” for Machines
The work by Thomason, Kingston, and Kavraki is a fantastic example of unlocking hidden potential in the hardware we already have. By cleverly rethinking the mathematics of movement to fit modern processor architecture, they have given robots a massive upgrade in their “speed of thought.”
The next time you see a robot moving fluidly, adapting instantly to a chaotic world, remember that the secret might just be fine-grained parallelism, performing motions in microseconds.